

DAG
DAG とは Directed acyclic graph 有向非巡回グラフの略で、閉路のない有向グラフのことです。

有向非巡回グラフ、有向非循環グラフ、有向無閉路グラフ(ゆうこうひじゅんかいグラフ、英: Directed acyclic graph, DAG)とは、グラフ理論における閉路のない有向グラフのことである。有向グラフは頂点と有向辺(方向を示す矢印付きの辺)からなり、辺は頂点同士をつなぐが、ある頂点 \(v\) から出発し、辺をたどり、頂点 \(v\) に戻ってこないのが有向非巡回グラフである[1][2][3]。
出典: フリー百科事典『ウィキペディア(Wikipedia)』
DAG であれば、トポロジカルソートを使うことで、ダイクストラ法やベルマンフォード法より速く、\( O(V + E)\)で最短経路を求めることができます。
トポロジカルソート
トポロジカルソート(英: topological sort)とは、グラフ理論において、有向非巡回グラフ(英: directed acyclic graph, DAG)の各ノードを順序付けして、どのノードもその出力辺の先のノードより前にくるように並べることである。有向非巡回グラフは必ずトポロジカルソートすることができる。
出典: フリー百科事典『ウィキペディア(Wikipedia)』
DAGでなので、「入力辺を持たないノード」は開始ノードになります。
「入力辺を持たないノード」から隣接ノードへのエッジを削除します。
もし隣接ノードが他に入力エッジを持たない場合は、この隣接ノードは開始ノードに続くノードと判断できます。
トポロジカルソートの計算量は\(O(V+E)\)です。


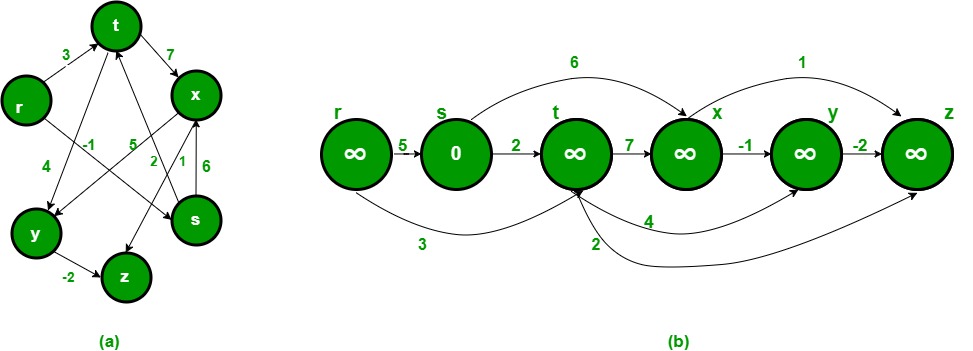
以下のグラフ (a) をトポロジカルソートしてみます。
{kind=link}
import collections
import sys
class Node(object):
def __init__(self, name):
self.name = name
self.indegree = 0
self.adjacency_list = []
self.predecessor = None
class ShortestPathDAG(object):
def __init__(self, nodes):
self.nodes = nodes
self.topological_sorted_list = []
def topological_sort(self):
queue = collections.deque()
for node in self.nodes:
if node.indegree == 0:
queue.append(node)
while queue:
current_node = queue.popleft()
self.topological_sorted_list.append(current_node)
for neighbor, weight in current_node.adjacency_list:
neighbor.indegree -= 1
if neighbor.indegree == 0:
queue.append(neighbor)
if len(self.nodes) != len(self.topological_sorted_list):
raise Exception('Not DAG')
if __name__ == '__main__':
r = Node('r')
s = Node('s')
t = Node('t')
x = Node('x')
y = Node('y')
z = Node('z')
r.indegree = 0
r.adjacency_list.extend([(t, 3), (s, -1)])
s.indegree = 1
s.adjacency_list.extend([(t, 2), (x, 6)])
t.indegree = 2
t.adjacency_list.extend([(x, 7), (y, 4)])
x.indegree = 2
x.adjacency_list.extend([(y, 5), (z, 1)])
y.indegree = 2
y.adjacency_list.extend([(z, -2)])
z.indegree = 2
z.adjacency_list.extend([])
nodes = [r, s, t, x, y, z]
shortest_path_dag = ShortestPathDAG(nodes)
shortest_path_dag.topological_sort()
# r s t x y z
for node in shortest_path_dag.topological_sorted_list:
print(node.name, end=' ')
DAGの最短経路
トポロジカルソート後の最短経路の計算は簡単に行えます。
開始地点の最短距離を0、その他を無限大に設定し、トポロジカルソート順に最短距離の更新を行うだけです。
計算量は\(O(V+E)\)です。
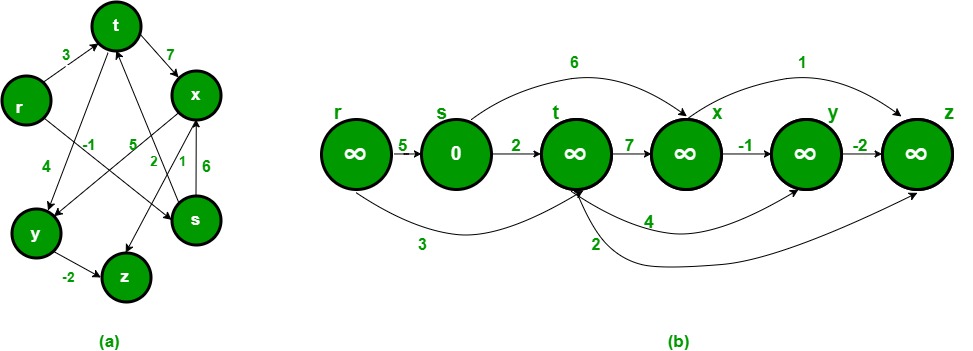
以下のグラフ(b) を探索します。
import collections
import sys
class Node(object):
def __init__(self, name):
self.name = name
self.indegree = 0
self.adjacency_list = []
self.min_distance = sys.maxsize
self.predecessor = None
class ShortestPathDAG(object):
def __init__(self, start_node, nodes):
self.start_node = start_node
self.nodes = nodes
self.topological_sorted_list = []
def _topological_sort(self):
queue = collections.deque()
for node in self.nodes:
if node.indegree == 0:
queue.append(node)
while queue:
current_node = queue.popleft()
self.topological_sorted_list.append(current_node)
for neighbor, _ in current_node.adjacency_list:
neighbor.indegree -= 1
if neighbor.indegree == 0:
queue.append(neighbor)
if len(self.nodes) != len(self.topological_sorted_list):
raise Exception('Not DAG')
def calculate_shoretest_path(self):
self._topological_sort()
self.start_node.min_distance = 0
for node in self.topological_sorted_list:
for neighbor, weight in node.adjacency_list:
temp_distance = node.min_distance + weight
if temp_distance < neighbor.min_distance:
neighbor.min_distance = temp_distance
neighbor.predecessor = node
def show_shotest_path(self, goal):
current_node = goal
order_list = []
while current_node is not None:
order_list.append(current_node.name)
current_node = current_node.predecessor
print(f'from {self.start_node.name} to {goal.name} distance {goal.min_distance}', order_list[::-1])
if __name__ == '__main__':
r = Node('r')
s = Node('s')
t = Node('t')
x = Node('x')
y = Node('y')
z = Node('z')
r.indegree = 0
r.adjacency_list.extend([(s, 5), (t, 3)])
s.indegree = 1
s.adjacency_list.extend([(t, 2), (x, 6)])
t.indegree = 2
t.adjacency_list.extend([(x, 7), (y, 4), (z, 2)])
x.indegree = 2
x.adjacency_list.extend([(y, -1), (z, 1)])
y.indegree = 2
y.adjacency_list.extend([(z, -2)])
z.indegree = 3
z.adjacency_list.extend([])
nodes = [r, s, t, x, y, z]
shortest_path_dag = ShortestPathDAG(s, nodes)
shortest_path_dag.calculate_shoretest_path()
# from s to r distance 9223372036854775807 ['r']
shortest_path_dag.show_shotest_path(r)
# from s to s distance 0 ['s']
shortest_path_dag.show_shotest_path(s)
# from s to t distance 2 ['s', 't']
shortest_path_dag.show_shotest_path(t)
# from s to x distance 6 ['s', 'x']
shortest_path_dag.show_shotest_path(x)
# from s to y distance 5 ['s', 'x', 'y']
shortest_path_dag.show_shotest_path(y)
# from s to z distance 3 ['s', 'x', 'y', 'z']
shortest_path_dag.show_shotest_path(z)
想定通りの結果になりました。
最長経路問題
最長経路問題はNP完全問題です。
最短経路とは逆の問題で、最長単純道問題もある。最短経路の場合は、最短経路の部分問題もやはり最短経路であるが、最長単純道の場合、部分構造最適性が成立しておらず、貪欲法などで解くことが出来ない。辺の重みなしであっても、NP完全問題である。
出典: フリー百科事典『ウィキペディア(Wikipedia)』
しかし、DAGであればトポロジカルソートを使う最短経路とほぼ同様な考え方で解くことができます。
Longest Path in a Directed Acyclic Graph

